6. OpenCV: ステレオビジョン#
6.1. ステレオマッチングによる三次元復元#
ステレオビジョン で紹介したステレオマッチングによる三次元復元を行うには、
カメラ・キャリブレーション
基本行列の計算とステレオ平行化
ステレオマッチング
の3つのステップを経る必要がある。
6.1.1. カメラ・キャリブレーション#
まずは、ステレオマッチングのための画像を用意しよう。
以下の画像を各自のコンピュータにダウンロードして、画面に表示したうえでキャリブレーション用の写真を数枚撮影する。
import cv2
import numpy as np
from IPython.display import Image
size = (5 + 1, 6 + 1)
xs, ys = np.mgrid[: size[0], : size[1]]
grid = np.zeros((size[0], size[1]), dtype=np.uint8)
grid[(xs + ys) % 2 == 0] = 255
grid = cv2.resize(grid, (size[1] * 100, size[0] * 100), interpolation=cv2.INTER_NEAREST)
_, bytes = cv2.imencode('.png', grid)
glue('chessboard_image', Image(data=bytes, format='png'), display=False)
図 6.1 キャリブレーションに用いるチェスボード画像#
なお、上記の画像は、内部のコーナー点が5x6個のチェスボードパターンなので注意すること。
撮影が完了したら、適当なフォルダ (以下では stereo) に calibration_0001.jpg 等の名前をつけて保存しておく。
データが用意できたら以下のキャリブレーション用のプログラムを実行して、カメラの内部パラメータとレンズの歪み係数を求めておく。
from pathlib import Path
import cv2
import numpy as np
# キャリブレーションのパラメータ
data_root = Path('data', 'stereo')
pattern_size = (5, 6) # チェスボードのコーナー数 (行, 列)
n_calib_images = 7 # キャリブレーション画像の枚数
# チェスボードのコーナー点の3次元座標
obj_corners = np.zeros((pattern_size[1] * pattern_size[0], 3), np.float32)
obj_corners[:, :2] = np.indices(pattern_size).T.reshape((-1, 2))
# キャリブレーション用画像の読み込み
files = [data_root / f'calibration_{i:04d}.jpg' for i in range(1, n_calib_images + 1)]
images = [cv2.imread(str(f), cv2.IMREAD_COLOR) for f in files]
grays = [cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) for img in images]
# コーナー点の検出
obj_points = []
img_points = []
results = []
for i, img in enumerate(grays):
# コーナー点を荒く検出
success, img_corners = cv2.findChessboardCorners(img, pattern_size)
# 検出に成功したら精度を高める
if success:
img_corners2 = cv2.cornerSubPix(
img,
img_corners,
(11, 11),
(-1, -1),
(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_MAX_ITER, 20, 1e-4),
)
# 対応する点の座標を保存
obj_points.append(obj_corners)
img_points.append(img_corners2)
# 結果の確認
res = images[i].copy()
cv2.drawChessboardCorners(res, pattern_size, img_corners2, success)
results.append(res)
else:
print(f'Chessboard corners not found in image {i + 1}')
# キャリブレーション
### cv2.CALIB_FIX_ASPECT_RATIO を指定して画素のアスペクト比を固定
### cv2.CALIB_ZERO_TANGENT_DIST を指定して接線歪みを無視
height, width = images[0].shape[:2]
rms, K, dist, _, _ = cv2.calibrateCamera(
obj_points,
img_points,
(width, height),
np.empty(0),
np.empty(0),
flags=cv2.CALIB_FIX_ASPECT_RATIO | cv2.CALIB_ZERO_TANGENT_DIST,
)
dist = dist.flatten()
# 結果の確認
print(f'再投影誤差:\n{rms:.6f} [px]')
print('内部行列:\n', K)
print('歪み係数:\n', dist)
再投影誤差:
0.176770 [px]
内部行列:
[[790.95697144 0. 496.86736813]
[ 0. 790.95697144 298.60417252]
[ 0. 0. 1. ]]
歪み係数:
[ 0.08249897 -0.3386506 0. 0. 0.38662893]
正しく計算ができている場合、通常のカメラであれば、再投影誤差は1px以下になる。
また、内部行列中の焦点距離 \(f\) は画像の高さと幅の平均の値、光学中心の位置 \((c_x, c_y)\) は幅と高さの半分程度の値になるはずである。
歪み係数については、どのくらい広角で撮影したかによって大きさが変わるため、一概には言いづらいが、一般的にそれほど大きな値が現れることはない。
基本行列の計算とステレオ平行化#
キャリブレーションによって、内部行列と歪み係数が求まったら、ステレオ画像に対して基本行列を計算する。
まずは、各自でステレオ画像を用意しよう。
各画像は以下で平行化するので、同じシーンを撮影していれば、カメラの姿勢が多少変化しても問題ないが、もし以後の処理で失敗する場合には、背景に何かがが映り込んでいるようなシーンを撮影すると、特徴点のマッチングが上手く行きやすい。
撮影した画像を先ほどと同様に適当なフォルダ (以下では stereo) に xxxx_l.jpg, xxxx_r.jpg 等の名前をつけて保存しておく。
画像が撮影できたら、これら2枚の画像からSIFT特徴を検出して対応点を求める。
各画像から cv2.SIFT.create() で得られる特徴量検出器によって特徴量を検出したら、 cv2.BFMatcher (brute-force matcherの略)を使用して特徴点のマッチングを行う。
以下のプログラムでは knnMatch に k=2 を指定して、1枚目の画像上の特徴点に対して、2枚目の画像上で2番目に近い特徴点までを求めている。
その後、マッチングの精度を上げるために、1番目と2番目の距離の比が0.7以下のものだけを good_matches に残している (特徴点が正確にマッチすれば、1番近い点までの距離はほぼ0であると想定)。
# 画像の読み込み
img1 = cv2.imread(str(data_root / 'robot_l.jpg'), cv2.IMREAD_COLOR)
img2 = cv2.imread(str(data_root / 'robot_r.jpg'), cv2.IMREAD_COLOR)
# 特徴点の検出
sift = cv2.SIFT.create()
kp1, desc1 = sift.detectAndCompute(img1, np.empty(0))
kp2, desc2 = sift.detectAndCompute(img2, np.empty(0))
# 特徴点のマッチング
matcher = cv2.BFMatcher(cv2.NORM_L2)
matches = matcher.knnMatch(desc1, desc2, k=2)
good_matches = [m for m, n in matches if m.distance < 0.7 * n.distance]
# 信頼度の高いマッチング点を抽出
pts1 = [kp1[m.queryIdx].pt for m in good_matches]
pts2 = [kp2[m.trainIdx].pt for m in good_matches]
pts1 = np.array(pts1, dtype=np.float32)
pts2 = np.array(pts2, dtype=np.float32)
このようにして、ある程度正確な特徴点のペアが求まったら、これらを使って基本行列を計算する。
基本行列の計算には各カメラの光学中心を原点とするカメラ座標系における点の座標を求める必要があるのだった。
撮影に用いているカメラにはレンズの歪みが含まれるはずなので、そのようなケースに対してもカメラ座標系への変換が可能な cv2.undistortPoints を使用する。この関数は、カメラの内部行列と歪み係数を引数にとり、画像上の点をカメラ座標系に変換してくれる。
# マッチング点をカメラ座標系に変換
pts1c = cv2.undistortPoints(pts1, K, dist)
pts2c = cv2.undistortPoints(pts2, K, dist)
カメラ座標に変換した対応点の位置を cv2.findFundamentalMat に渡すと、基本行列が計算できる。
以下のコードでは、基本行列を求めるアルゴリズムにRANSACを使用している。
引数にある prob は、出力の基本行列が満たすべき信頼度を表していて、1に近いほど、より多くの点がエピポーラ拘束式を満たす必要がある (故に計算時間が長くなる)。一方、threshold は、エピポーラ拘束式を満たすとみなすための距離の閾値を表している。
cv2.findFundamentalMat の戻り値は、基本行列と、RANSACによって選ばれた正しい対応点のインデックスであり、以後の点では、正しい対応点だけを用いるように対応点の座標をフィルタリングしておく。
# 基本行列の計算
E, mask = cv2.findEssentialMat(
pts1c,
pts2c,
np.eye(3),
method=cv2.RANSAC,
prob=0.999,
threshold=1.0e-4,
)
# 対応点をフィルタリング
pts1c = pts1c[mask.ravel() == 1]
pts2c = pts2c[mask.ravel() == 1]
基本行列が計算できたら次は、外部行列を計算して、画像を平衡化する。
基本行列を外部行列に分解するには cv2.recoverPose を、平行化のための回転行列を求めるには cv2.stereoRectify を使用する。
# 外部行列の復元
_, R, t, _ = cv2.recoverPose(E, pts1c, pts2c)
# 平行化のための行列を求める
R1, R2, P1, P2, Q, _, _ = cv2.stereoRectify(K, dist, K, dist, (width, height), R, t, alpha=0)
cv2.stereoRectify の戻り値は、平行化のための回転行列 (R1, R2) と、1枚目のカメラに対するカメラ座標系で表された点を2台のカメラそれぞれの画像平面に射影するための投影行列 (P1, P2)、そして、視差画像を深度画像に変換する行列 Q である。
これらの戻り値を用いると、平行化前後の画素の対応関係を cv2.initUndistortRectifyMap を使用して求めることができる。この関数は、対応する平行化後の画像上の画素 \((x, y)\) に対する平行化前の画素の位置 \((x'(x, y), y'(x, y))\) を map1x と map1y に格納してくれるので、これを cv2.remap に渡して平行化後の画像を得る。
# 平行化前後の画素の対応関係を求める
map1x, map1y = cv2.initUndistortRectifyMap(K, dist, R1, P1, (width, height), cv2.CV_16SC2)
map2x, map2y = cv2.initUndistortRectifyMap(K, dist, R2, P2, (width, height), cv2.CV_16SC2)
# 平行化
img1_rect = cv2.remap(img1, map1x, map1y, cv2.INTER_LINEAR)
img2_rect = cv2.remap(img2, map2x, map2y, cv2.INTER_LINEAR)
import matplotlib.pyplot as plt
fig = plt.figure(figsize=(10, 7))
gs = fig.add_gridspec(2, 2)
ax1 = plt.subplot(gs[0])
ax1.imshow(cv2.cvtColor(img1, cv2.COLOR_BGR2RGB))
ax1.set(xticks=[], yticks=[], title='左画像 (入力)')
ax2 = plt.subplot(gs[1])
ax2.imshow(cv2.cvtColor(img2, cv2.COLOR_BGR2RGB))
ax2.set(xticks=[], yticks=[], title='右画像 (入力)')
ax3 = plt.subplot(gs[2])
ax3.imshow(cv2.cvtColor(img1_rect, cv2.COLOR_BGR2RGB))
ax3.set_title('左画像 (平行化後)')
ax3.set(xticks=[], yticks=[])
ax4 = plt.subplot(gs[3])
ax4.imshow(cv2.cvtColor(img2_rect, cv2.COLOR_BGR2RGB))
ax4.set_title('右画像 (平行化後)')
ax4.set(xticks=[], yticks=[])
fig.tight_layout()
plt.show()
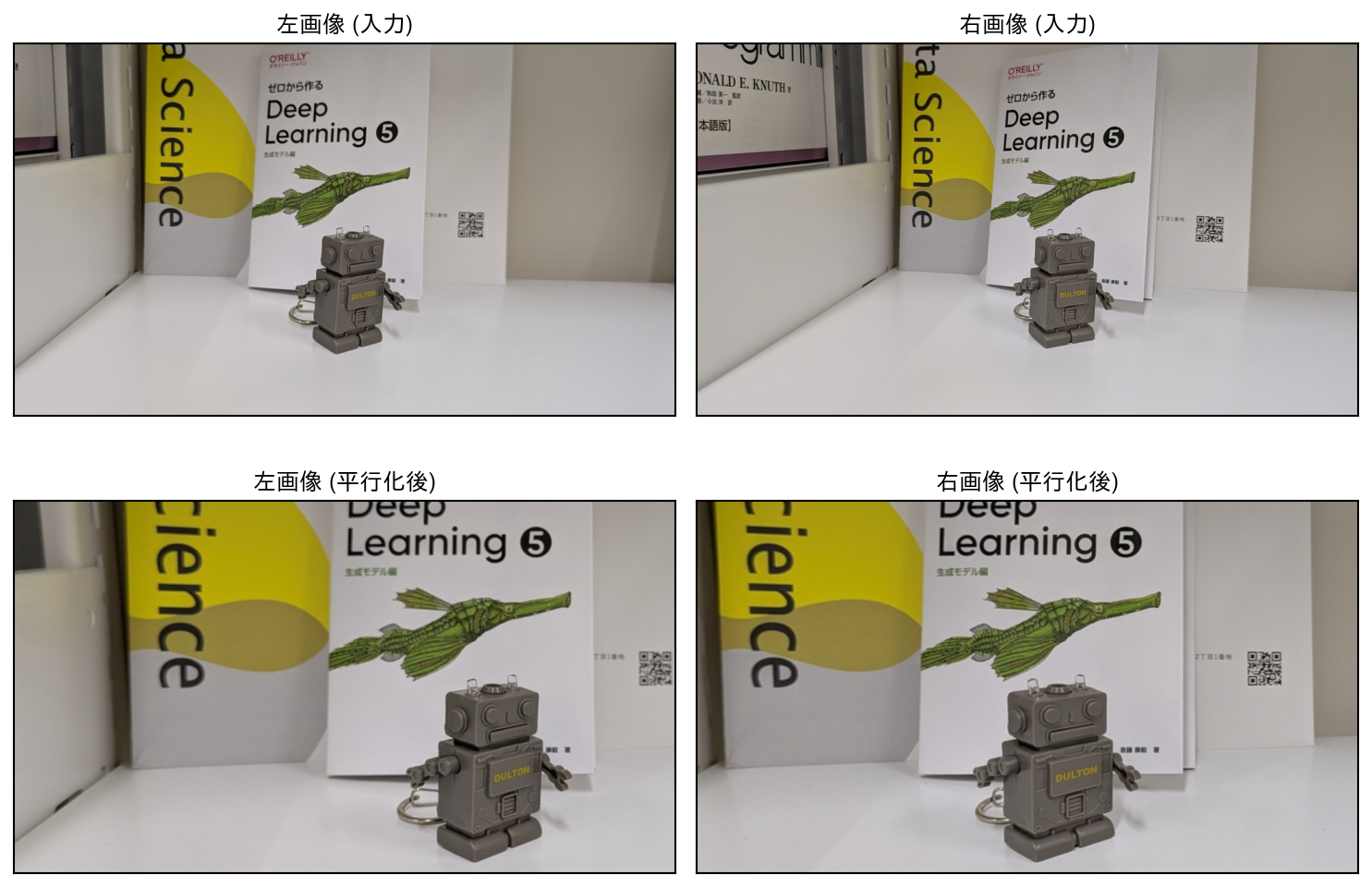
以上で、画像の平行化は完了なので、次のステレオマッチングのために得られた画像を保存しておこう。
ステレオマッチング#
画像が平行化できたら、その画像を入力にしてステレオマッチングを行う。
OpenCVには、ステレオマッチングのためのクラスがいくつか用意されていて、単純なブロックマッチングを行う cv2.StereoBM とセミ・グローバル法を用いる cv2.StereoSGBM がある。
これらのクラスはファクトリメソッドである create を用いてインスタンスを得ることができる。
いずれのクラスもファクトリメソッドの引数に minDisparity と numDisparities を指定する必要がある。
ここで minDisparity は、視差画像の最小値を表していて、通常は0を指定すれば良い。また、名前が少々紛らわしいが numDisparities は、視差の最大値を表す。numDisparities は平行化された画像を見て、一番カメラに近い箇所がどの程度の視差を持つかを見て設定するのが良いだろう。
視差画像が得られたら、stereoRectify の戻り値である Q を用いて、視差画像を深度画像に変換する。この変換には、単純に cv2.reprojectImageTo3D を使用すれば良い。
import cv2
import numpy as np
# セミグローバル法による視差画像の計算
stereo = cv2.StereoSGBM.create(
minDisparity=0,
numDisparities=224,
blockSize=1,
P1=1,
P2=1000,
)
# 視差画像の正規化
disp = stereo.compute(img1_rect, img2_rect).astype(np.float32)
disp = disp / 16.0 # SGBMの出力は視差が16倍されている
disp[disp <= 0] = 0.0
# 深度画像の計算
depth = cv2.reprojectImageTo3D(disp, Q)
depth[disp <= 0] = 0.0
以上の処理を経て得られた視差画像と深度画像を以下に示す。
import matplotlib.pyplot as plt
from mpl_toolkits.axes_grid1 import make_axes_locatable
fig = plt.figure(figsize=(12, 4))
gs = fig.add_gridspec(1, 2)
ax = plt.subplot(gs[0])
im = ax.imshow(disp, cmap='rainbow')
ax.set(xticks=[], yticks=[])
ax.set_title('視差画像')
div = make_axes_locatable(ax)
cax = div.append_axes('right', size='3%', pad=0.1)
cb = fig.colorbar(im, cax=cax)
ax = plt.subplot(gs[1])
im = ax.imshow(depth[:, :, 2], cmap='rainbow')
ax.set(xticks=[], yticks=[])
ax.set_title('深度画像')
div = make_axes_locatable(ax)
cax = div.append_axes('right', size='3%', pad=0.1)
cb = fig.colorbar(im, cax=cax)
fig.tight_layout()
plt.show()
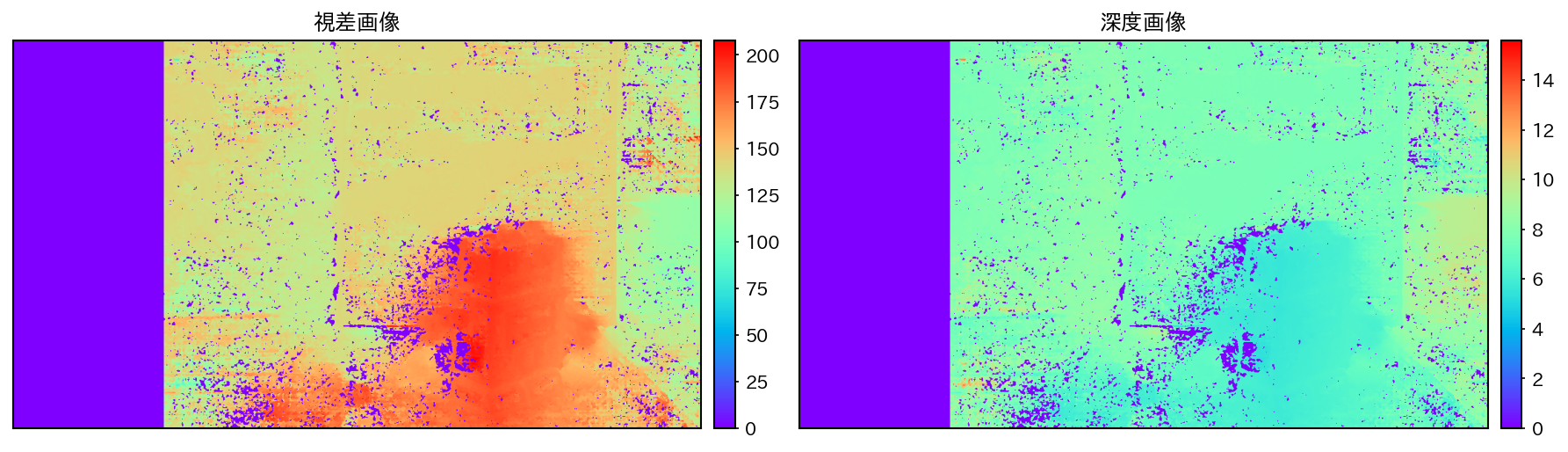
深度画像が得られたら、画素の位置 \((x, y)\) と、深度 \(z(x, y)\) を用いて、全ての有効画素 (視差 disp が0より大きい画素) を三次元空間の点 \((x, y, z)\) に変換する。
このような点群データはWavefront OBJ (*.obj) やStanford PLY (*.ply) 形式で保存することで他のプログラムで表示できる。
以下はPLY形式での保存を行うプログラムである。
import numpy as np
from plyfile import PlyData, PlyElement
# 三次元点群の作成
depth = depth.reshape(-1, 3)
depth = depth[disp.ravel() > 0.0]
xs, ys, zs = depth[:, 0], depth[:, 1], depth[:, 2]
xyz = np.stack((xs, ys, zs), axis=1)
rgb = img1_rect.reshape(-1, 3)
rgb = rgb[disp.ravel() > 0.0]
rgb = rgb[:, ::-1]
# PLYファイルとして保存
ply_name = 'points.ply'
n_points = xs.shape[0]
vertex = np.empty(
n_points,
dtype=[
('x', 'f4'),
('y', 'f4'),
('z', 'f4'),
('red', 'u1'),
('green', 'u1'),
('blue', 'u1'),
],
)
vertex['x'] = xyz[:, 0].astype(np.float32)
vertex['y'] = xyz[:, 1].astype(np.float32)
vertex['z'] = xyz[:, 2].astype(np.float32)
vertex['red'] = rgb[:, 0].astype(np.uint8)
vertex['green'] = rgb[:, 1].astype(np.uint8)
vertex['blue'] = rgb[:, 2].astype(np.uint8)
element = PlyElement.describe(vertex, 'vertex')
ply = PlyData([element], text=False)
ply.write(ply_name)
作成されたPLYファイルは MeshLab や CloudCompare などの他、 vscode-3d-previewなどの拡張を入れればVSCode上でも表示することができる。